LLM-Planner: Few-Shot Grounded Planning for Embodied Agents with Large Language Models
Published:
This paper introduces LLM-Planner, which utilizes LLMs as high-level planners for embodied agents, allowing them to generate and adapt plans according to the current environment. Experiments on the ALFRED dataset show that using less than 0.5% of paired training data, LLM-Planner achieves competitive performance with recent baselines that are trained using the full training data.

Link to project page
LLM-Planner: Few-Shot Grounded Planning with Large Language Models
Abstract
- The study focuses on using LLMs as a high-level planner for embodied agents that can follow natural language instructions to complete complex tasks in a visually-perceived environment
- A novel method, LLM-Planner, is proposed to perform few-shot high-level planning for embodied agents.
- The LLMs are enhanced with physical grounding to generate and update plans that are grounded in the current environment.
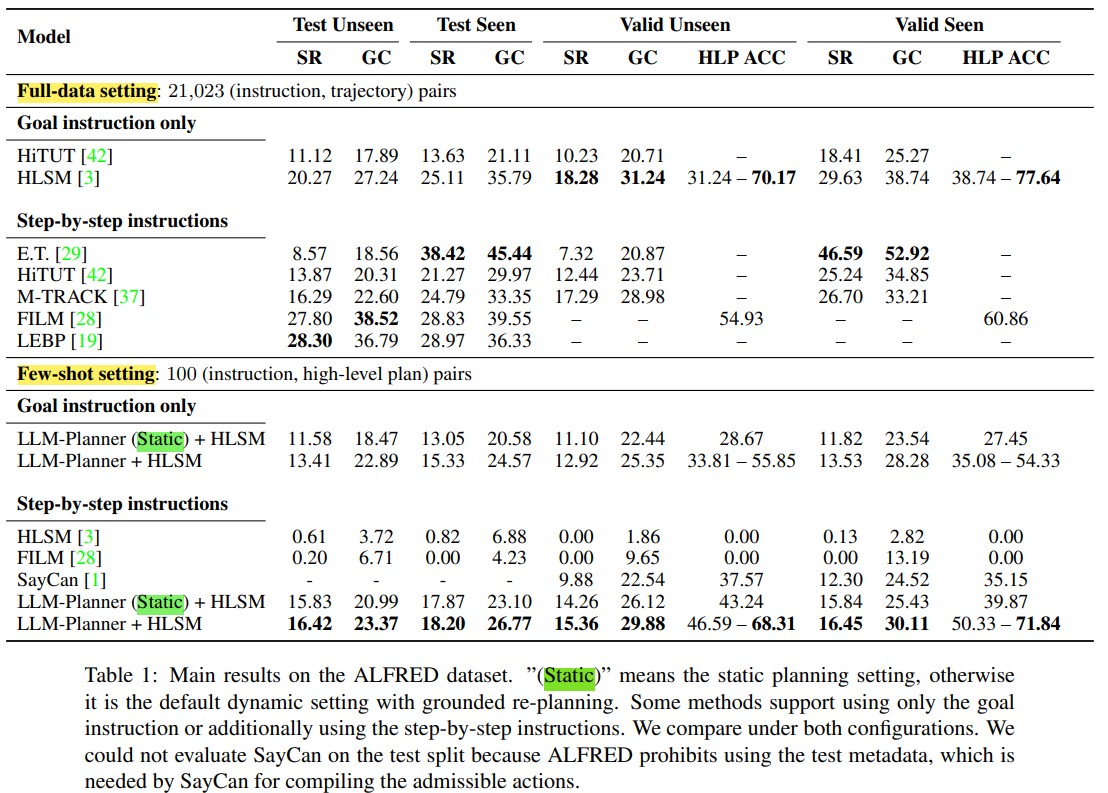
- Experiments on the ALFRED dataset show that using less than 0.5% of paired training data, LLM-Planner achieves competitive performance with recent baselines that are trained using the full training data.
- This work opens the door for developing versatile and sample-efficient embodied agents that can quickly learn many tasks.
Problem Statement
- Before LLM era, language driven agents require a large number of labeled samples to learn each task
- Recently, LLM-based agents have shown great few-shot learning abilities. However they are evaluated in limited evaluation setting:
- Example: evaluated in two environments with 15 object types
- Besides, current work mostly generate a single static plan from the language instruction, instead of dynamically adjust the plan based on the feedback from the environment
Methodology
Overview
- Design appropriate prompt:
- Appropriate prompt helps to guide LLM to generate high-level plans (HLP)s
- kNN retriever:
- The authors adopt kNN to retrieve similar examples for LLM to perform in-context learning
- Grounded re-planning algorithm:
- Grounded re-planning algorithm is used to enhance LLMs’ ability to adapt to the environment, improving HLP quality
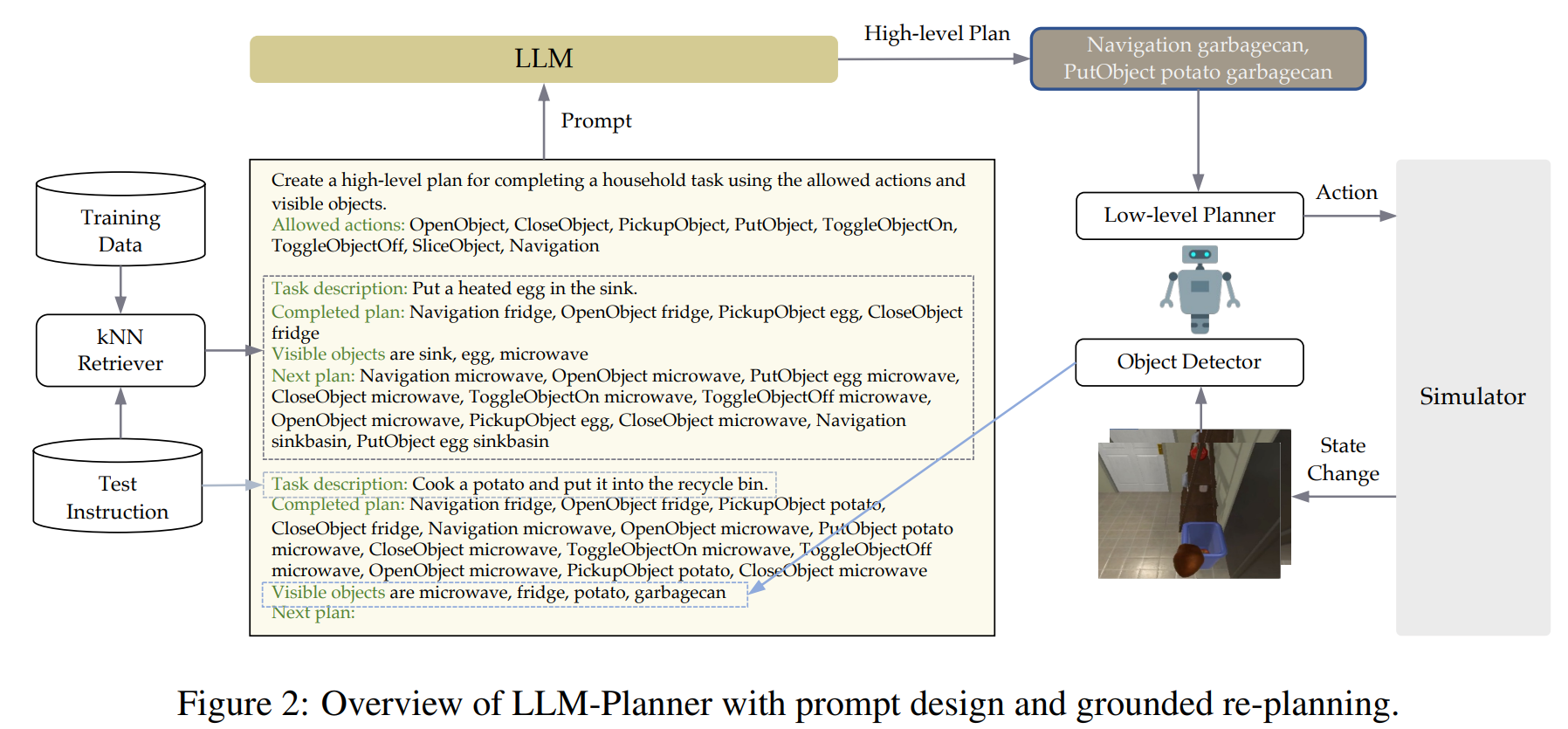
1. Prompt Design
As shown in Figure 2, The prompt begins with:
- An intuitive explanation of the task + list of allowable high-level actions.
- Next, in-context examples selected by the kNN retriever, consists of:
- “Task description: [high-level goal instruction].”
- “Step-by step instructions (optional): [step-by-step instructions]”
- Dynamic grounded re-planning, consists of:
- “Completed plan: [sub-goals that have been completed]”
- “Visible objects: [observed objects]”
- Finally, we append the test example in the same format that ends with “Next plan:”
2. In-context Example Retrieval
- High quality in-context examples can improve performance of the LLM-agent
- Intuitively if the current task is to “cook a potato,” an in-context example demonstrates “cooking an egg” is likely more informative than one that demonstrates how to “clean a plate”
- Frozen BERT-base model is used to generate the embedding for the test example.
- Next, Euclidean distance is used to measure the similarity between the tasks
- The K most similar examples to the current task are selected as context examples.
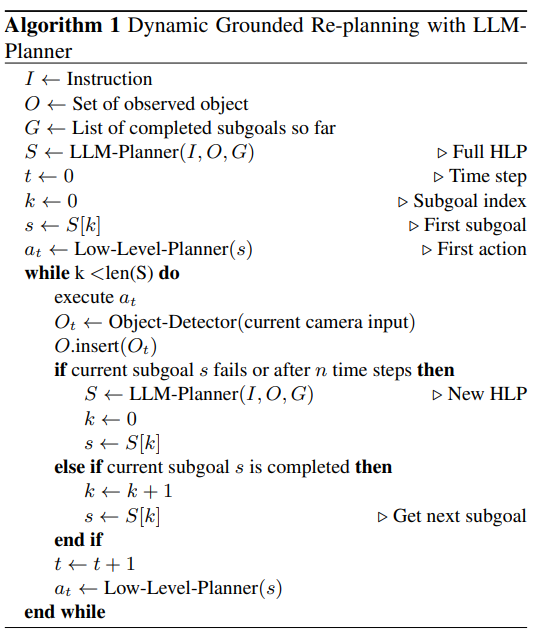
3. Grounded Re-planning
- Static high-level planning lacks grounding to physical environment, which lead to:
- the agent fails to execute an action (e.g., bumping into a wall)
- take long time and fail to accomplish a task (e.g., wandering endlessly)
- Re-planning will be triggered under 2 conditions:
- agent fails to execute an action
- after fixed number of steps
- The re-planning algorithm will generate a new plan based on the partially completed HLP, to help the agent unstuck
4. Integration with Existing Vision-and-Language Navigation (VLN) models
- VLN task is defined as following:
- Given a language instruction I, an agent needs to predict and carry out a sequence of primitive actions in the environment E to accomplish the task
- The authors integrated LLM-Planner with existing VLN models, HLSM to turn the HLP from LLM-Planner into low-level plan
Results
Metrics
- Success rate (SR): percentage of tasks fully completed by the agents
- High-level planning accuracy (HLP ACC)
- Goal-condition success rate (GC)
Reference
- Song et al. “LLM-Planner: Few-Shot Grounded Planning for Embodied Agents with Large Language Models”, ICCV 2023